Назва / Рисунок
Формула
Мінімум
Область пошуку
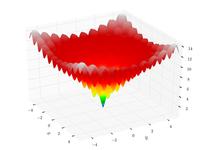
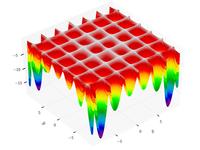
Ackley's function
f
(
x
,
y
)
=
−
20
exp
(
−
0.2
0.5
(
x
2
+
y
2
)
)
{\displaystyle f(x,y)=-20\exp \left(-0.2{\sqrt {0.5\left(x^{2}+y^{2}\right)}}\right)}
−
exp
(
0.5
(
cos
(
2
π
x
)
+
cos
(
2
π
y
)
)
)
+
e
+
20
{\displaystyle -\exp \left(0.5\left(\cos \left(2\pi x\right)+\cos \left(2\pi y\right)\right)\right)+e+20}
f
(
0
,
0
)
=
0
{\displaystyle f(0,0)=0}
−
5
≤
x
,
y
≤
5
{\displaystyle -5\leq x,y\leq 5}
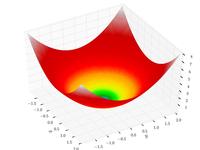
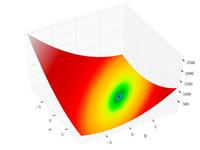
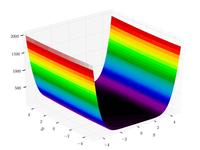
Sphere function
f
(
x
)
=
∑
i
=
1
n
x
i
2
{\displaystyle f({\boldsymbol {x}})=\sum _{i=1}^{n}x_{i}^{2}}
f
(
0
,
…
,
0
)
=
0
{\displaystyle f(0,\dots ,0)=0}
−
∞
≤
x
i
≤
∞
{\displaystyle -\infty \leq x_{i}\leq \infty }
1
≤
i
≤
n
{\displaystyle 1\leq i\leq n}
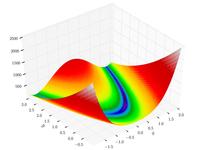
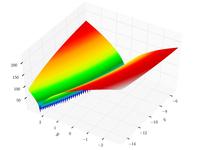
Функція Розенброка
f
(
x
)
=
∑
i
=
1
n
−
1
[
100
(
x
i
+
1
−
x
i
2
)
2
+
(
x
i
−
1
)
2
]
{\displaystyle f({\boldsymbol {x}})=\sum _{i=1}^{n-1}\left[100\left(x_{i+1}-x_{i}^{2}\right)^{2}+\left(x_{i}-1\right)^{2}\right]}
Min
=
{
n
=
2
→
f
(
1
,
1
)
=
0
,
n
=
3
→
f
(
1
,
1
,
1
)
=
0
,
n
>
3
→
f
(
1
,
…
,
1
⏟
(
n
)
times
)
=
0
{\displaystyle {\text{Min}}={\begin{cases}n=2&\rightarrow \quad f(1,1)=0,\\n=3&\rightarrow \quad f(1,1,1)=0,\\n>3&\rightarrow \quad f\left(\underbrace {1,\dots ,1} _{(n){\text{ times}}}\right)=0\\\end{cases}}}
−
∞
≤
x
i
≤
∞
{\displaystyle -\infty \leq x_{i}\leq \infty }
1
≤
i
≤
n
{\displaystyle 1\leq i\leq n}
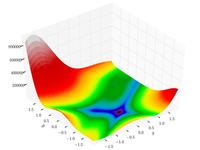
Beale's function
f
(
x
,
y
)
=
(
1.5
−
x
+
x
y
)
2
+
(
2.25
−
x
+
x
y
2
)
2
{\displaystyle f(x,y)=\left(1.5-x+xy\right)^{2}+\left(2.25-x+xy^{2}\right)^{2}}
+
(
2.625
−
x
+
x
y
3
)
2
{\displaystyle +\left(2.625-x+xy^{3}\right)^{2}}
f
(
3
,
0.5
)
=
0
{\displaystyle f(3,0.5)=0}
−
4.5
≤
x
,
y
≤
4.5
{\displaystyle -4.5\leq x,y\leq 4.5}
Goldstein–Price function
f
(
x
,
y
)
=
{\displaystyle f(x,y)=}
(
1
+
(
x
+
y
+
1
)
2
(
19
−
14
x
+
3
x
2
−
14
y
+
6
x
y
+
3
y
2
)
)
{\displaystyle \left(1+\left(x+y+1\right)^{2}\left(19-14x+3x^{2}-14y+6xy+3y^{2}\right)\right)}
(
30
+
(
2
x
−
3
y
)
2
(
18
−
32
x
+
12
x
2
+
48
y
−
36
x
y
+
27
y
2
)
)
{\displaystyle \left(30+\left(2x-3y\right)^{2}\left(18-32x+12x^{2}+48y-36xy+27y^{2}\right)\right)}
f
(
0
,
−
1
)
=
3
{\displaystyle f(0,-1)=3}
−
2
≤
x
,
y
≤
2
{\displaystyle -2\leq x,y\leq 2}
Booth's function
f
(
x
,
y
)
=
(
x
+
2
y
−
7
)
2
+
(
2
x
+
y
−
5
)
2
{\displaystyle f(x,y)=\left(x+2y-7\right)^{2}+\left(2x+y-5\right)^{2}}
f
(
1
,
3
)
=
0
{\displaystyle f(1,3)=0}
−
10
≤
x
,
y
≤
10
{\displaystyle -10\leq x,y\leq 10}
Bukin function N.6
f
(
x
,
y
)
=
100
|
y
−
0.01
x
2
|
+
0.01
|
x
+
10
|
.
{\displaystyle f(x,y)=100{\sqrt {\left|y-0.01x^{2}\right|}}+0.01\left|x+10\right|.\quad }
f
(
−
10
,
1
)
=
0
{\displaystyle f(-10,1)=0}
−
15
≤
x
≤
−
5
{\displaystyle -15\leq x\leq -5}
−
3
≤
y
≤
3
{\displaystyle -3\leq y\leq 3}
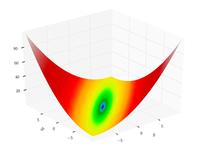
Matyas function
f
(
x
,
y
)
=
0.26
(
x
2
+
y
2
)
−
0.48
x
y
{\displaystyle f(x,y)=0.26\left(x^{2}+y^{2}\right)-0.48xy}
f
(
0
,
0
)
=
0
{\displaystyle f(0,0)=0}
−
10
≤
x
,
y
≤
10
{\displaystyle -10\leq x,y\leq 10}
Lévi function N.13
f
(
x
,
y
)
=
sin
2
(
3
π
x
)
+
(
x
−
1
)
2
(
1
+
sin
2
(
3
π
y
)
)
{\displaystyle f(x,y)=\sin ^{2}\left(3\pi x\right)+\left(x-1\right)^{2}\left(1+\sin ^{2}\left(3\pi y\right)\right)}
+
(
y
−
1
)
2
(
1
+
sin
2
(
2
π
y
)
)
{\displaystyle +\left(y-1\right)^{2}\left(1+\sin ^{2}\left(2\pi y\right)\right)}
f
(
1
,
1
)
=
0
{\displaystyle f(1,1)=0}
−
10
≤
x
,
y
≤
10
{\displaystyle -10\leq x,y\leq 10}
Three-hump camel function
f
(
x
,
y
)
=
2
x
2
−
1.05
x
4
+
x
6
6
+
x
y
+
y
2
{\displaystyle f(x,y)=2x^{2}-1.05x^{4}+{\frac {x^{6}}{6}}+xy+y^{2}}
f
(
0
,
0
)
=
0
{\displaystyle f(0,0)=0}
−
5
≤
x
,
y
≤
5
{\displaystyle -5\leq x,y\leq 5}
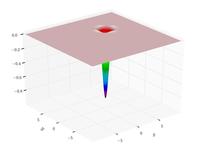
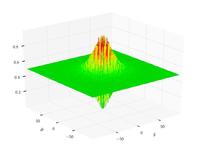
Easom function
f
(
x
,
y
)
=
−
cos
(
x
)
cos
(
y
)
{\displaystyle f(x,y)=-\cos \left(x\right)\cos \left(y\right)}
exp
(
−
(
(
x
−
π
)
2
+
(
y
−
π
)
2
)
)
{\displaystyle \exp \left(-\left(\left(x-\pi \right)^{2}+\left(y-\pi \right)^{2}\right)\right)}
f
(
π
,
π
)
=
−
1
{\displaystyle f(\pi ,\pi )=-1}
−
100
≤
x
,
y
≤
100
{\displaystyle -100\leq x,y\leq 100}
Cross-in-tray function
f
(
x
,
y
)
=
−
0.0001
{\displaystyle f(x,y)=-0.0001}
(
|
sin
(
x
)
sin
(
y
)
exp
(
|
100
−
x
2
+
y
2
π
|
)
|
+
1
)
0.1
{\displaystyle \left(\left|\sin \left(x\right)\sin \left(y\right)\exp \left(\left|100-{\frac {\sqrt {x^{2}+y^{2}}}{\pi }}\right|\right)\right|+1\right)^{0.1}}
Min
=
{
f
(
1.34941
,
−
1.34941
)
=
−
2.06261
f
(
1.34941
,
1.34941
)
=
−
2.06261
f
(
−
1.34941
,
1.34941
)
=
−
2.06261
f
(
−
1.34941
,
−
1.34941
)
=
−
2.06261
{\displaystyle {\text{Min}}={\begin{cases}f\left(1.34941,-1.34941\right)&=-2.06261\\f\left(1.34941,1.34941\right)&=-2.06261\\f\left(-1.34941,1.34941\right)&=-2.06261\\f\left(-1.34941,-1.34941\right)&=-2.06261\\\end{cases}}}
−
10
≤
x
,
y
≤
10
{\displaystyle -10\leq x,y\leq 10}
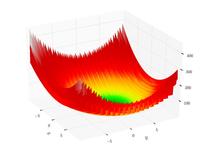
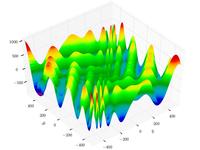
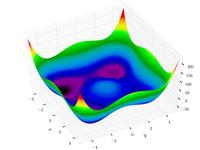
Eggholder function
f
(
x
,
y
)
=
−
(
y
+
47
)
sin
(
|
x
2
+
(
y
+
47
)
|
)
{\displaystyle f(x,y)=-\left(y+47\right)\sin \left({\sqrt {\left|{\frac {x}{2}}+\left(y+47\right)\right|}}\right)}
−
x
sin
(
|
x
−
(
y
+
47
)
|
)
{\displaystyle -x\sin \left({\sqrt {\left|x-\left(y+47\right)\right|}}\right)}
f
(
512
,
404.2319
)
=
−
959.6407
{\displaystyle f(512,404.2319)=-959.6407}
−
512
≤
x
,
y
≤
512
{\displaystyle -512\leq x,y\leq 512}
Hölder table function
f
(
x
,
y
)
=
−
|
sin
(
x
)
cos
(
y
)
exp
(
|
1
−
x
2
+
y
2
π
|
)
|
{\displaystyle f(x,y)=-\left|\sin \left(x\right)\cos \left(y\right)\exp \left(\left|1-{\frac {\sqrt {x^{2}+y^{2}}}{\pi }}\right|\right)\right|}
Min
=
{
f
(
8.05502
,
9.66459
)
=
−
19.2085
f
(
−
8.05502
,
9.66459
)
=
−
19.2085
f
(
8.05502
,
−
9.66459
)
=
−
19.2085
f
(
−
8.05502
,
−
9.66459
)
=
−
19.2085
{\displaystyle {\text{Min}}={\begin{cases}f\left(8.05502,9.66459\right)&=-19.2085\\f\left(-8.05502,9.66459\right)&=-19.2085\\f\left(8.05502,-9.66459\right)&=-19.2085\\f\left(-8.05502,-9.66459\right)&=-19.2085\end{cases}}}
−
10
≤
x
,
y
≤
10
{\displaystyle -10\leq x,y\leq 10}
McCormick function
f
(
x
,
y
)
=
sin
(
x
+
y
)
+
(
x
−
y
)
2
−
1.5
x
+
2.5
y
+
1
{\displaystyle f(x,y)=\sin \left(x+y\right)+\left(x-y\right)^{2}-1.5x+2.5y+1}
f
(
−
0.54719
,
−
1.54719
)
=
−
1.9133
{\displaystyle f(-0.54719,-1.54719)=-1.9133}
−
1.5
≤
x
≤
4
{\displaystyle -1.5\leq x\leq 4}
−
3
≤
y
≤
4
{\displaystyle -3\leq y\leq 4}
Schaffer function N. 2
f
(
x
,
y
)
=
0.5
+
sin
2
(
x
2
−
y
2
)
−
0.5
(
1
+
0.001
(
x
2
+
y
2
)
)
2
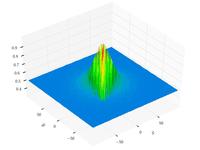
{\displaystyle f(x,y)=0.5+{\frac {\sin ^{2}\left(x^{2}-y^{2}\right)-0.5}{\left(1+0.001\left(x^{2}+y^{2}\right)\right)^{2}}}}
f
(
0
,
0
)
=
0
{\displaystyle f(0,0)=0}
−
100
≤
x
,
y
≤
100
{\displaystyle -100\leq x,y\leq 100}
Schaffer function N. 4
f
(
x
,
y
)
=
0.5
+
cos
2
(
sin
(
|
x
2
−
y
2
|
)
)
−
0.5
(
1
+
0.001
(
x
2
+
y
2
)
)
2
{\displaystyle f(x,y)=0.5+{\frac {\cos ^{2}\left(\sin \left(\left|x^{2}-y^{2}\right|\right)\right)-0.5}{\left(1+0.001\left(x^{2}+y^{2}\right)\right)^{2}}}}
f
(
0
,
1.25313
)
=
0.292579
{\displaystyle f(0,1.25313)=0.292579}
−
100
≤
x
,
y
≤
100
{\displaystyle -100\leq x,y\leq 100}
Styblinski–Tang function
f
(
x
)
=
∑
i
=
1
n
x
i
4
−
16
x
i
2
+
5
x
i
2
{\displaystyle f({\boldsymbol {x}})={\frac {\sum _{i=1}^{n}x_{i}^{4}-16x_{i}^{2}+5x_{i}}{2}}}
X
=
−
2.903534
,
…
,
−
2.903534
⏟
(
n
)
times
{\displaystyle X=\underbrace {-2.903534,\ldots ,-2.903534} _{(n){\text{ times}}}}
−
39.16617
n
<
f
(
X
)
<
−
39.16616
n
{\displaystyle -39.16617n<f(X)<-39.16616n}
−
5
≤
x
i
≤
5
{\displaystyle -5\leq x_{i}\leq 5}
1
≤
i
≤
n
{\displaystyle 1\leq i\leq n}
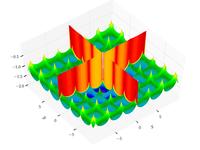
Simionescu function[1]
f
(
x
,
y
)
=
0.1
x
y
{\displaystyle f(x,y)=0.1xy}
subjected to:
x
2
+
y
2
≤
(
r
T
+
r
S
cos
(
n
arctan
x
y
)
)
2
{\displaystyle {\text{subjected to: }}x^{2}+y^{2}\leq \left(r_{T}+r_{S}\cos \left(n\arctan {\frac {x}{y}}\right)\right)^{2}}
where:
r
T
=
1
,
r
S
=
0.2
and
n
=
8
{\displaystyle {\text{where: }}r_{T}=1,r_{S}=0.2{\text{ and }}n=8}
f
(
±
0.85586214
,
∓
0.85586214
)
=
−
0.072625
{\displaystyle f(\pm 0.85586214,\mp 0.85586214)=-0.072625}
−
1.25
≤
x
,
y
≤
1.25
{\displaystyle -1.25\leq x,y\leq 1.25}











![{\displaystyle f({\boldsymbol {x}})=\sum _{i=1}^{n-1}\left[100\left(x_{i+1}-x_{i}^{2}\right)^{2}+\left(x_{i}-1\right)^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ac655db50e19ee2f79a97196565e8773cd7d659)



















































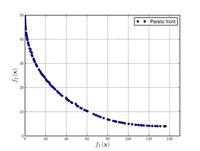



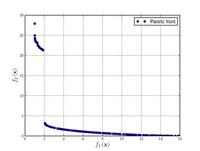

















![{\displaystyle {\text{Minimize}}={\begin{cases}f_{1}\left({\boldsymbol {x}}\right)&=\sum _{i=1}^{2}\left[-10\exp \left(-0.2{\sqrt {x_{i}^{2}+x_{i+1}^{2}}}\right)\right]\\&\\f_{2}\left({\boldsymbol {x}}\right)&=\sum _{i=1}^{3}\left[\left|x_{i}\right|^{0.8}+5\sin \left(x_{i}^{3}\right)\right]\\\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a545df8c08a178973284eae8924aab67ce46077a)








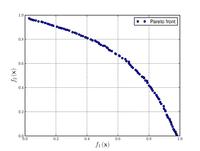
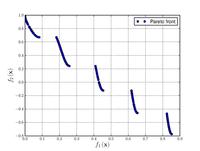
![{\displaystyle {\text{Minimize}}={\begin{cases}f_{1}\left(x,y\right)&=\left[1+\left(A_{1}-B_{1}\left(x,y\right)\right)^{2}+\left(A_{2}-B_{2}\left(x,y\right)\right)^{2}\right]\\f_{2}\left(x,y\right)&=\left(x+3\right)^{2}+\left(y+1\right)^{2}\\\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e6b4a1275cbe615b285fbbcdb840a9a488360cc5)










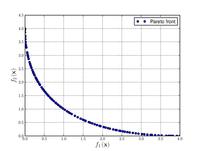
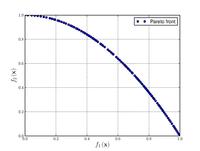
![{\displaystyle {\text{Minimize}}={\begin{cases}f_{1}\left({\boldsymbol {x}}\right)&=1-\exp \left(-4x_{1}\right)\sin ^{6}\left(6\pi x_{1}\right)\\f_{2}\left({\boldsymbol {x}}\right)&=g\left({\boldsymbol {x}}\right)h\left(f_{1}\left({\boldsymbol {x}}\right),g\left({\boldsymbol {x}}\right)\right)\\g\left({\boldsymbol {x}}\right)&=1+9\left[{\frac {\sum _{i=2}^{10}x_{i}}{9}}\right]^{0.25}\\h\left(f_{1}\left({\boldsymbol {x}}\right),g\left({\boldsymbol {x}}\right)\right)&=1-\left({\frac {f_{1}\left({\boldsymbol {x}}\right)}{g\left({\boldsymbol {x}}\right)}}\right)^{2}\\\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73a519e6f7ca429b41031cd0873fce161941b009)
















